Po nekaj mesecih planiranja in dobrem mesecu zbiranja opreme in testiranja smo končno prišli do vgradnje na barko.
Ideja je bila da vse skupaj izvedeva z električarjem v 1-2 dneh, saj sem vse lokacije za opremo, dolžino potrebnih kablov, varovalk in spremljevalne opreme preveril že v preteklih tednih.
Najprej sva odstranila staro svinčeno Varta 190Ah baterijo in počistila prostor okoli baterije. V ta prostor bo potrebno namestiti REC opremo (Active BMS, Precharge in WiFi modul) ter glavno varovalko in odklopnik (TBS DCM sistem z T-Class 300A varovalko, Battery Protect Relay in positive bus bar).
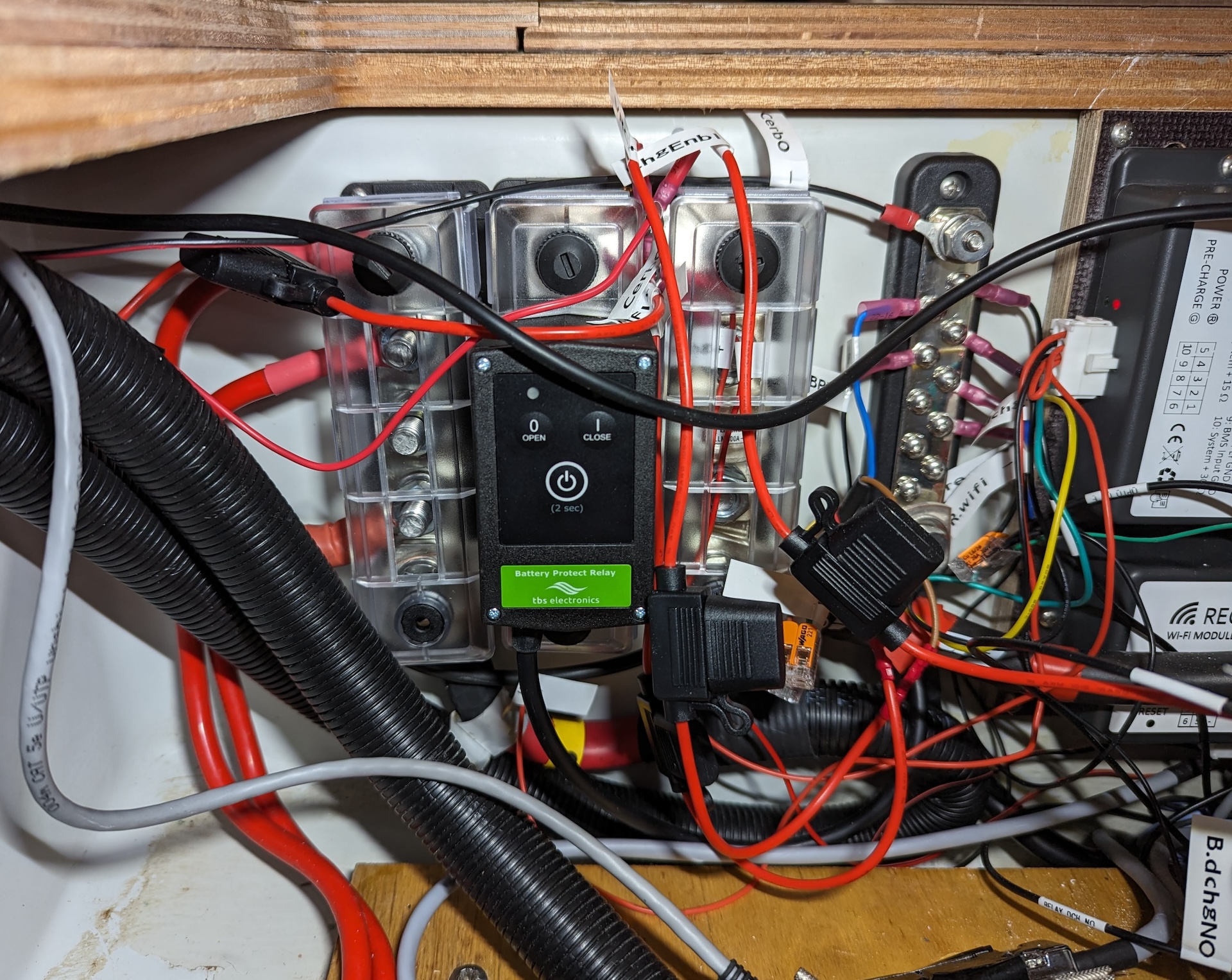
Takole izgleda končna postavitev: na desni TBS DCM modular, na sredi negative bus bar za kontrolno opremo, na desni pa REC Precharge, REC Active BMS in spodaj REC WiFi modul.

Potem sva odstranila stari 220V polnilec (Christec CPS3 40A). Na njegovo mesto je prišel nekaj večji Victron MultiPlus Compact 12/1600/70 inverter/charger. Z MultiPlus je bilo kar nekaj igranja, saj sva morala narediti dobro podlago (deska) na katero je pritrjen na steno, potem pa še najti lokacijo da je zadeva dovolj zračna okoli in da so priključki spodaj dostopni (za primer da je potrebno AC-in povezati direktno na AC-out).
Spremeniti sva morala tudi lokacijo od obstoječega BlueSolar MPPTja, zato da sva naredila prostor za Cerbo GX za nadzor.

Ker je imel stari polnilec tri izhode za polnenje vseh treh baterij (house, engine, bow) smo v novem sistemu poskrbeli za polnenje in vzdrževanje engine in bowthruter baterije preko Victron Orion 18A polnilcev. Tako bom imel svinčene baterije lepo vzdrževane tudi ko je barka sama in jo vzdržujejo samo solarni paneli.
Električar se je zelo potrudil, da je oba polnilca in 4 avtomatske varovalke (za vhod in izhod) z vsemi kabli namestil na desko, ki smo jo potem dali v prostor z baterijami na steno.

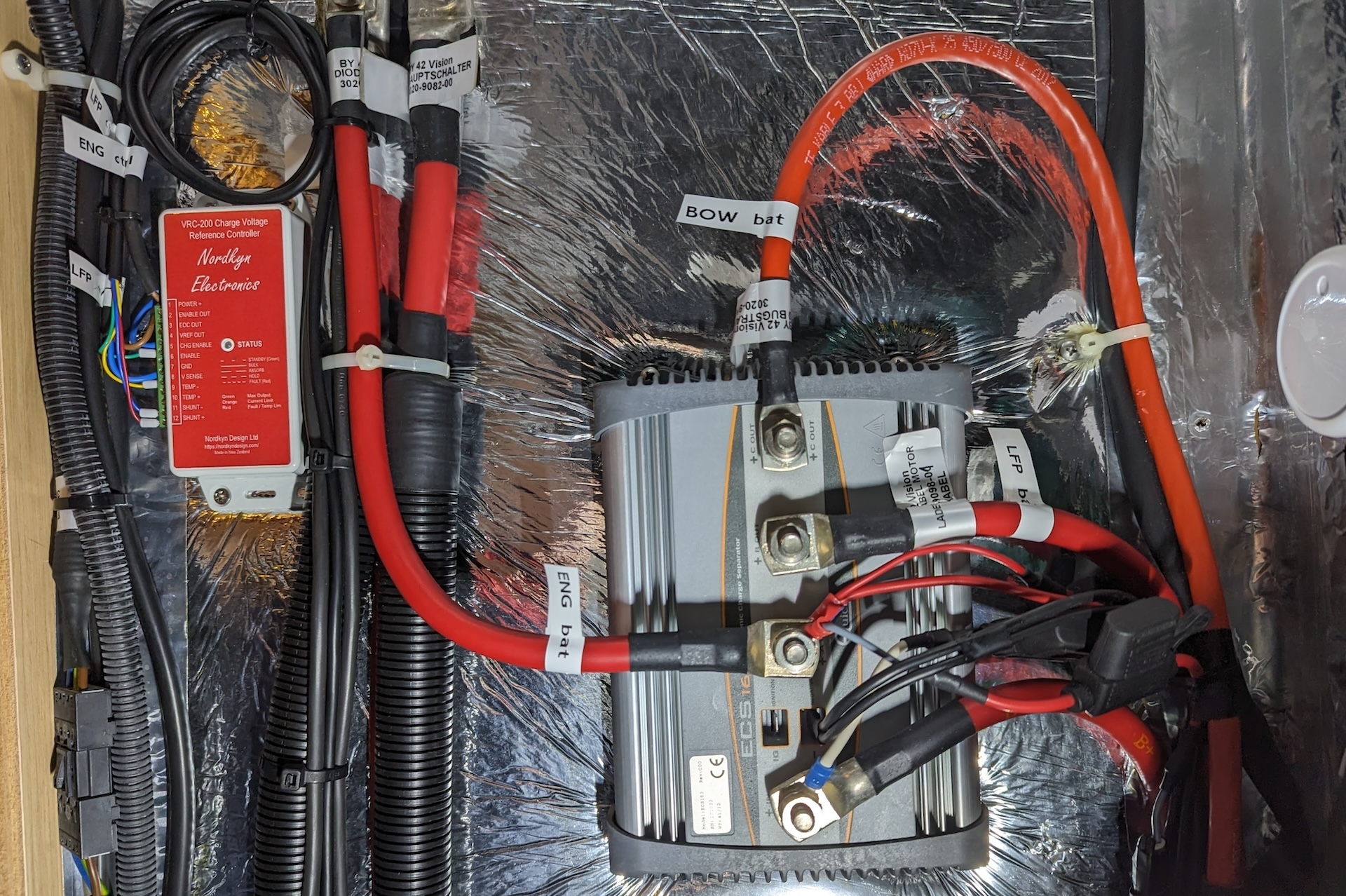
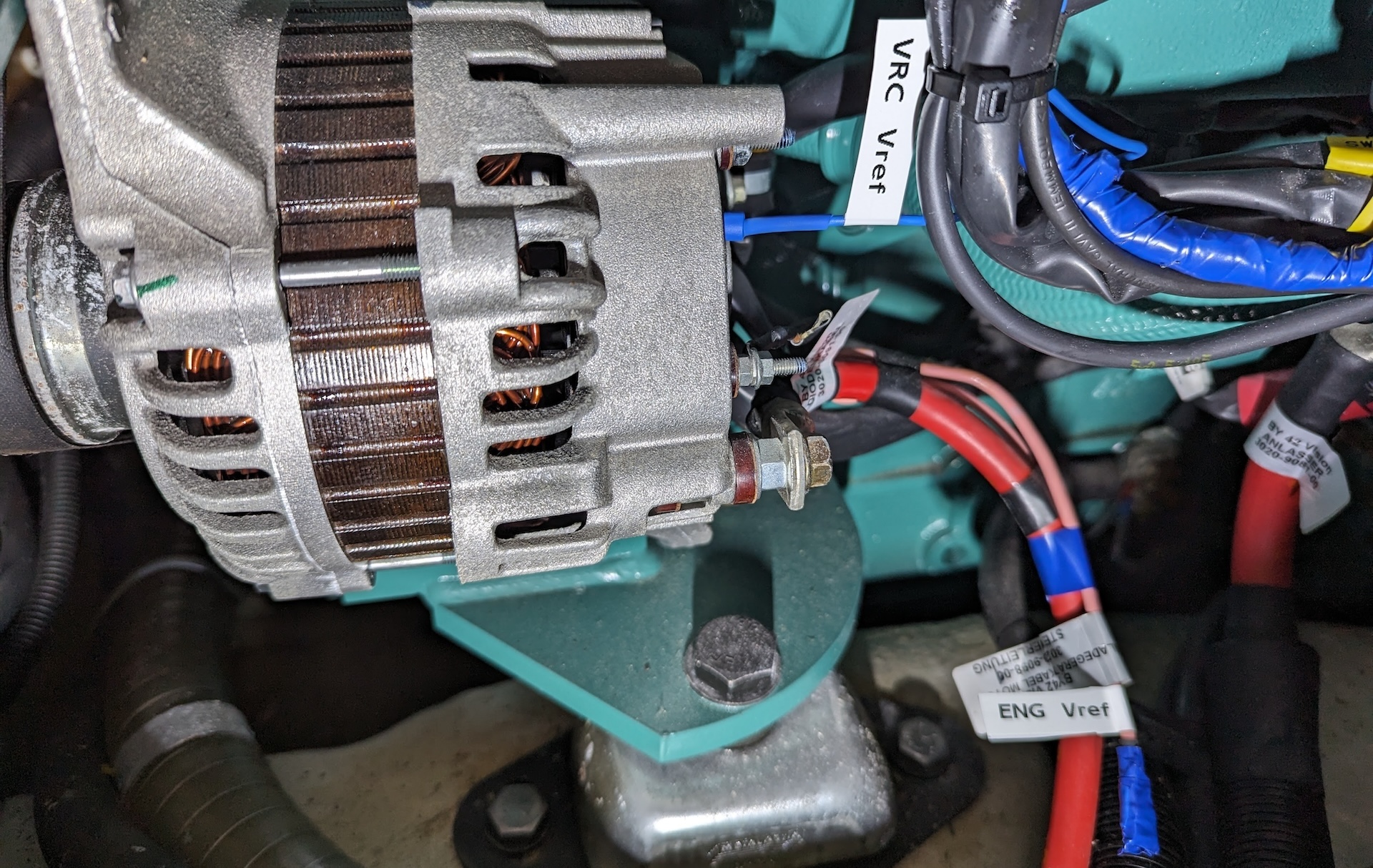
Sledila je montaža Nordkyn VRC-200 smart alternator regulatorja. Najprej smo morali od LFP baterije napeljati kabel za napajanje in kontrolni kabel (shunt +/-, V sense, charge enable). Našla sva primerno lokacijo, da je lahko dostopen za kontrolo (LED) ali morebitne dodatne nastavitve preko potenciometrov. Še vedno bo alternator polnil vse tri baterije preko ECS163 charge separatorja.
Navodila od VRC-200 so res dobro napisana, tako da smo brez problema naredili še priključek za Enable signal, ko ima motor kontakt (iz MDI kabla smo dodatno z podaljškom priključili kabel za VRC - pod modrim izolir trakom). Na alternator pa smo pripeljali V-ref (modri kabel), s katerim VRC-200 kontrolira Mitsubishi 115A alternator. Star V-ref kabel (roza) pa smo samo pritrdili.
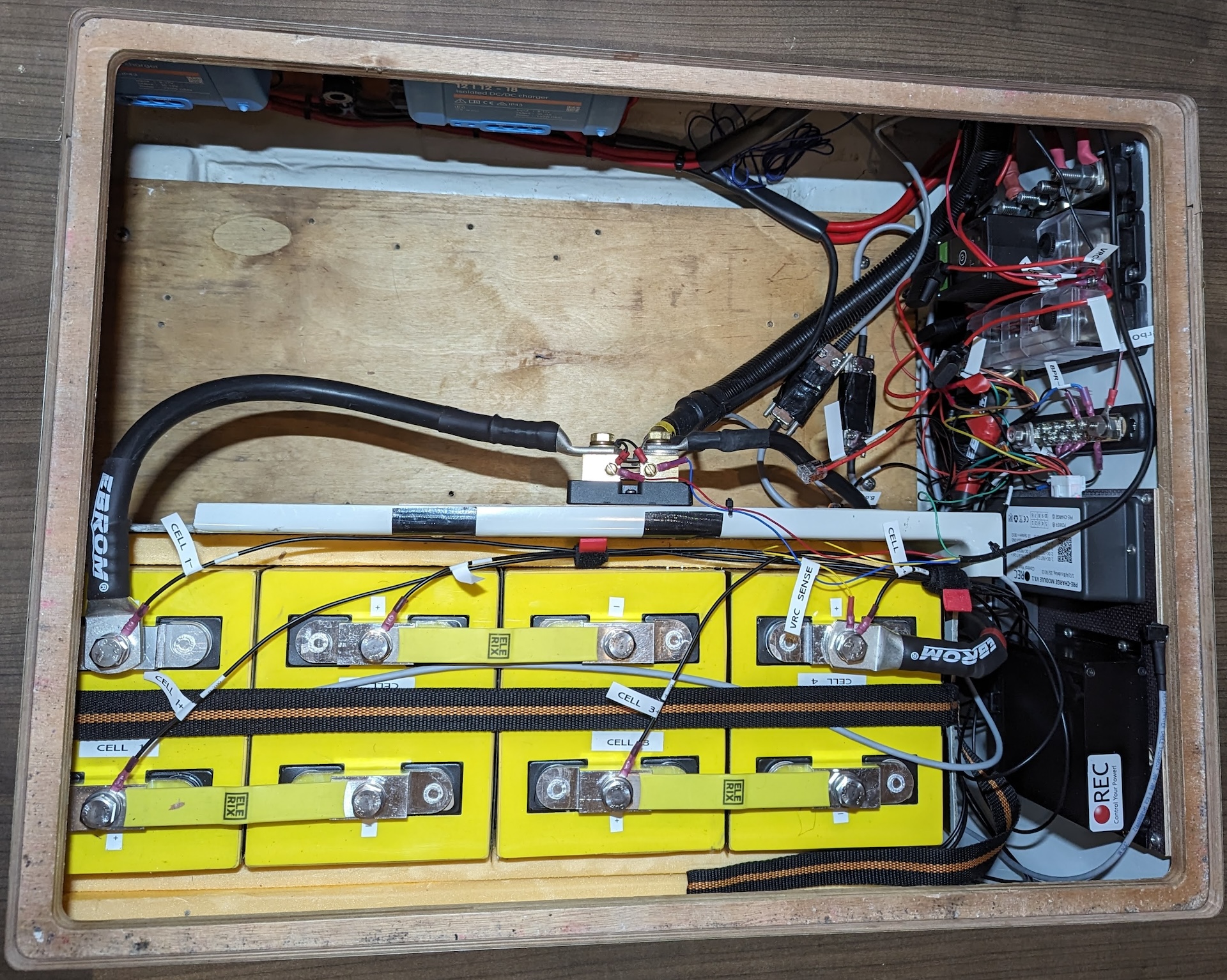
Na koncu je prostor za baterijo pod podnicami izgledal takole:
- 550Ah LFP baterija z shuntom, ki je povezan na BMS in VRC
- na desni strani od baterije REC Active BMS, REC Precharge in pod njim REC WiFi modul
- potem sledi negative bus bar za vse kontrolne enote
- zgoraj desno je TBS DCM module z 300A T-class glavno varovalko, Battery Protect Relayem in positive bus bar kjer so priključeni vsi porabniki in polnilci.
- zgoraj levo pa sta DC-DC polnilca za polnjenje in vzdrževanje engine in bowthruster baterije
Narediti moram še zaščito za priključke na bateriji (verjetno kar razrezano gumijasto cev) in pa verjetno tanek pleksi pokrov čez baterijo in shunt.
Kable moram še malo urediti, da bodo bolje speljani in pritrjeni in da ne bo vse skupaj izgledalo kot tole “šavje” na TBS odklopniku:
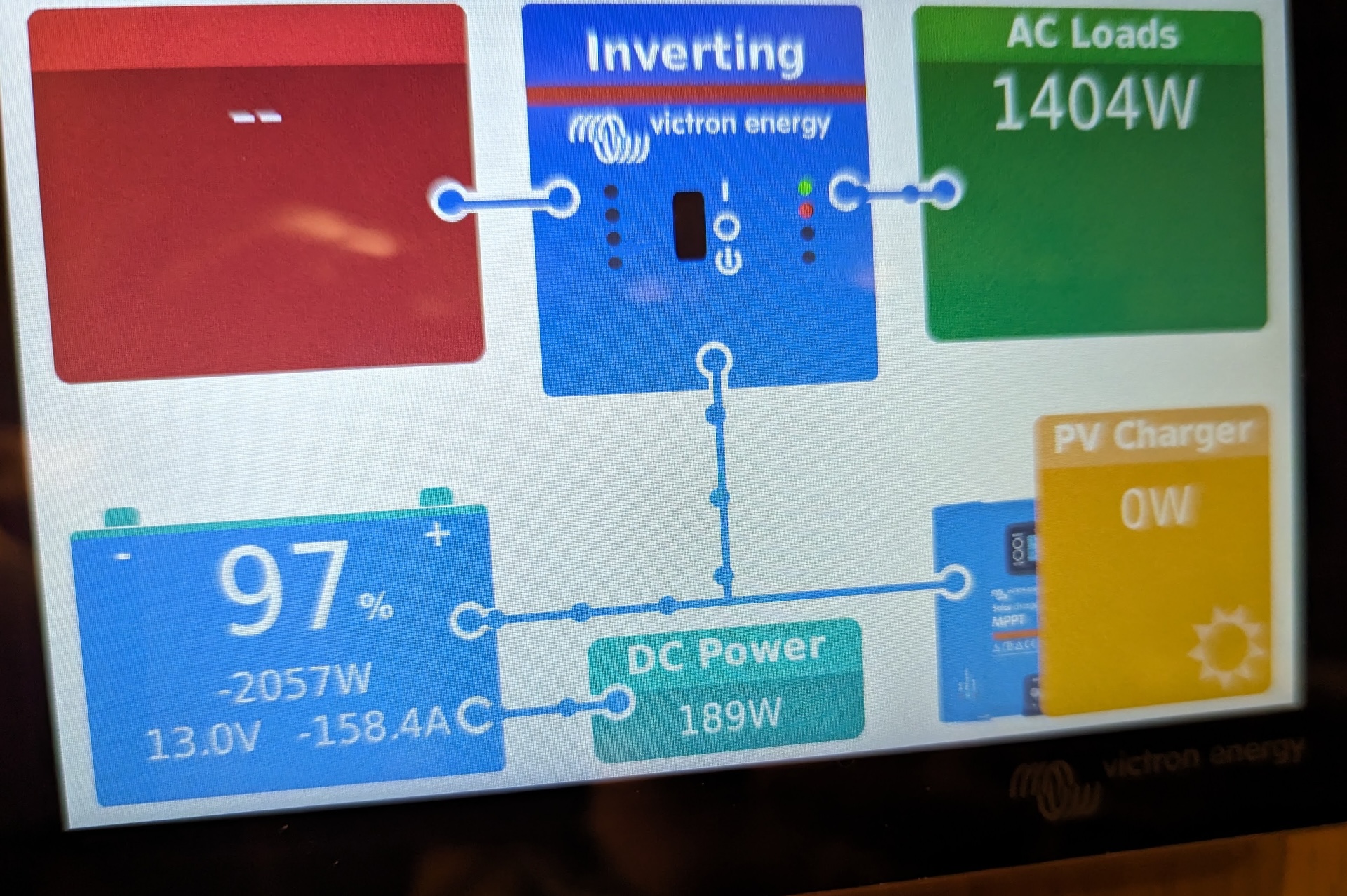
Ena od prvih stvari, ki sem jo sprobal je seveda inverter in to kar s kaloriferjem: je vlekel več kot 1400W in je MultiPlus deloval v overload načinu (rdeča pika na inverterju). Iz baterije je vleklo 158A…
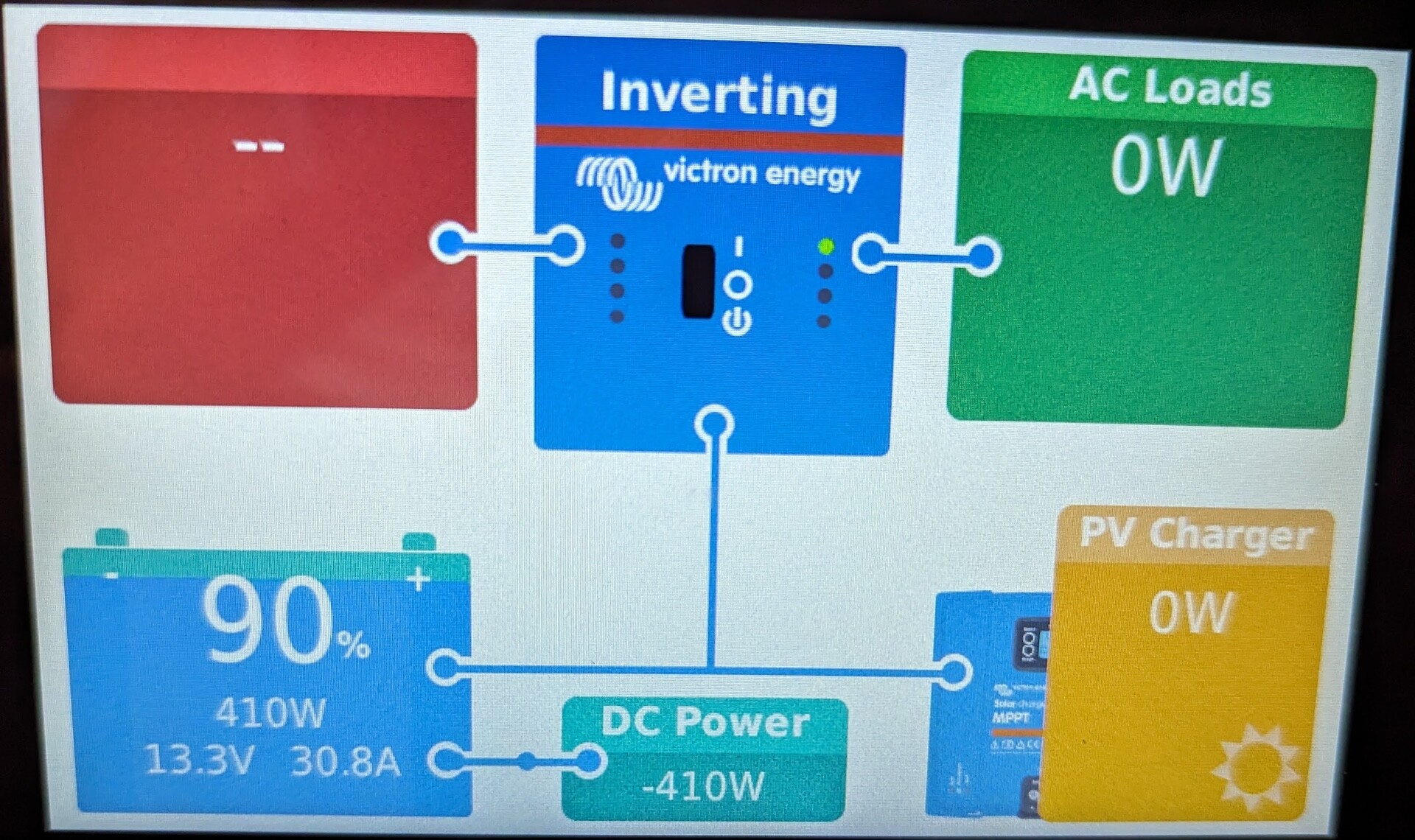
Naslednji test je bilo polnenje preko alternatorja. Najprej sem lepo ogreval motor cca 10 minut in se je baterija lepo polnila z 30A. Moram reči da je to več kot sem pričakoval da alternator daje od sebe ko je motor na nizkih obratih.
Potem sem pa motor dal na potovalnih 1700 rpm - toliko obratov ponavadi imam v bonaci ko vozim na Gori overdrive način. Polnenje se je začelo na 105-110A in tako vztrajalo precej dolgo, nekje do 95% napolnjenosti baterije.
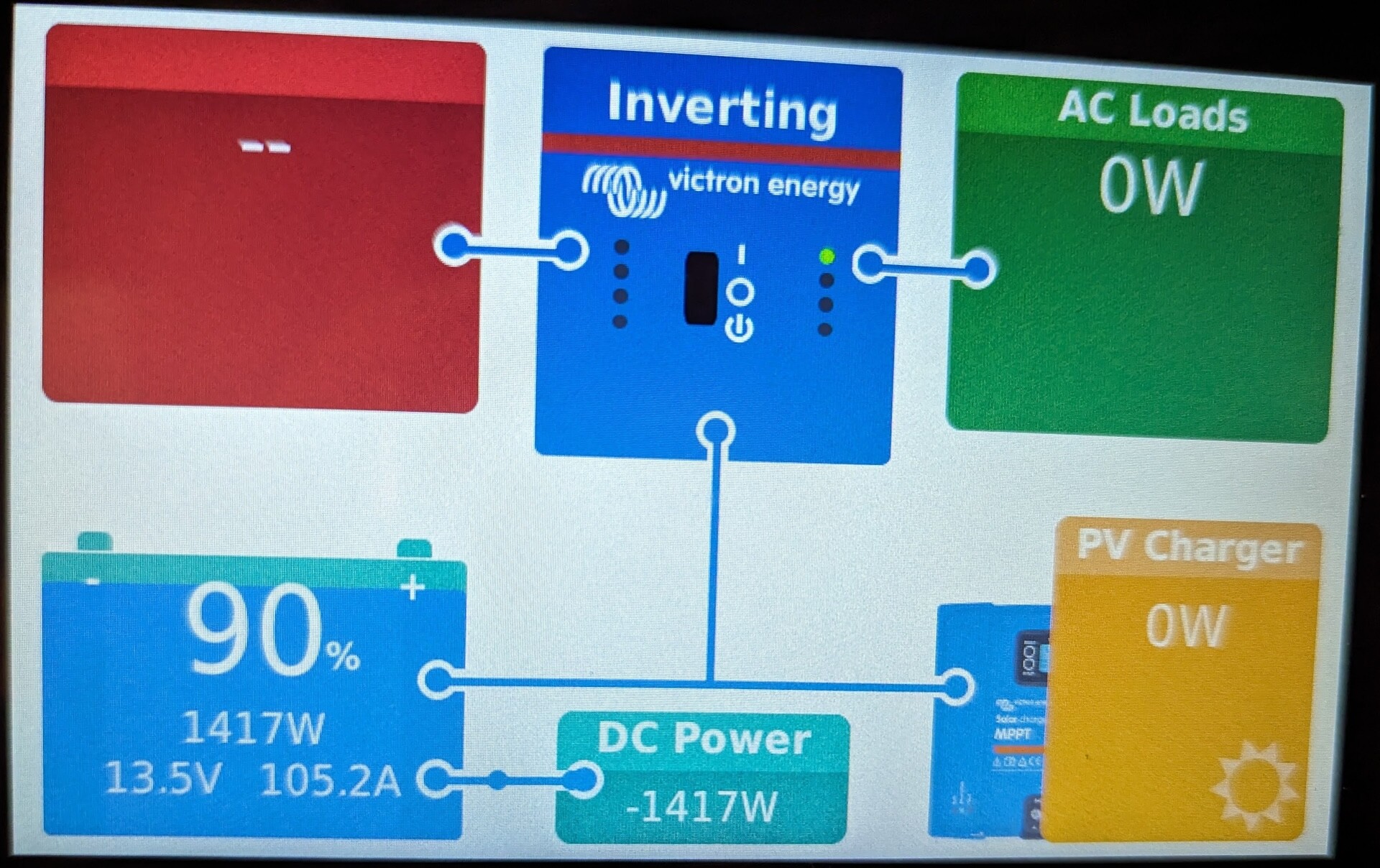
Potem je tok padel na 80-85A ali kot posledica upornosti baterije ali pa je regulator znižal tok zaradi pregrevanja alternatorja (nisem imel IR merilca temperature - bom naslednjič testiral z njim). Ko je prišla baterija na 100% se je polnjenje nadaljevalo in sem opazoval balansiranje na REC BMS. Že po kakšnih 10 minutah pa je BMS izklopil polnenje in je preko Charge Enable signala na VRC-200 izklopil polnenje preko alternatorja, tako da vse deluje kot pričakovano.
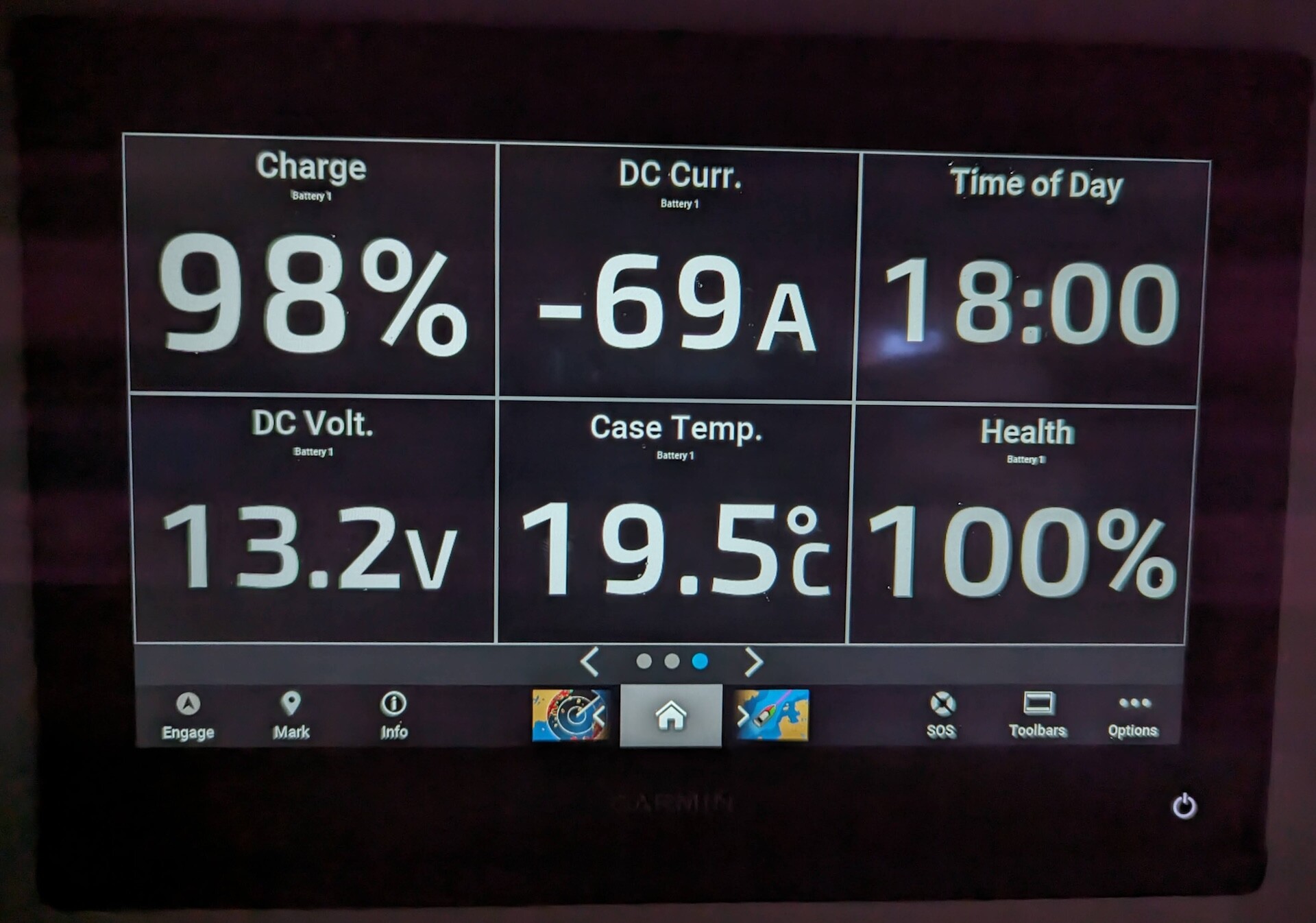
Že v temi sem samo preveril da deluje tudi Cerbo GX povezava v NMEA2000 omrežje. Na plotter sem na hitro dal samo neklaj podatkov iz baterije, tako da bodo sedaj na voljo tudi na krmilu.
Celotna inštalacija je vzela ena dolg dan in pol, tako da je bila ocena dva delovna dni bila kar točna. Sem precej zadovoljen s planiranjem, saj smo večino stvari predvideli in pripravili že vnaprej, tako da je bilo testiranje po priklopu res enostavno. Najbolj zamudne so bile montaže in pa iskanje manjkajočih zadev (prekratek kontrolni kabel do VRC-200, kratki kabli in negative priklop za DC-DC…).
Sem pa zelo zadovoljen z novim sistemom, saj imam sedaj več kot 3x toliko kapacitete, imam ves čas na voljo 220V preko inverterja in imam omogočen nadzor na daljavo.
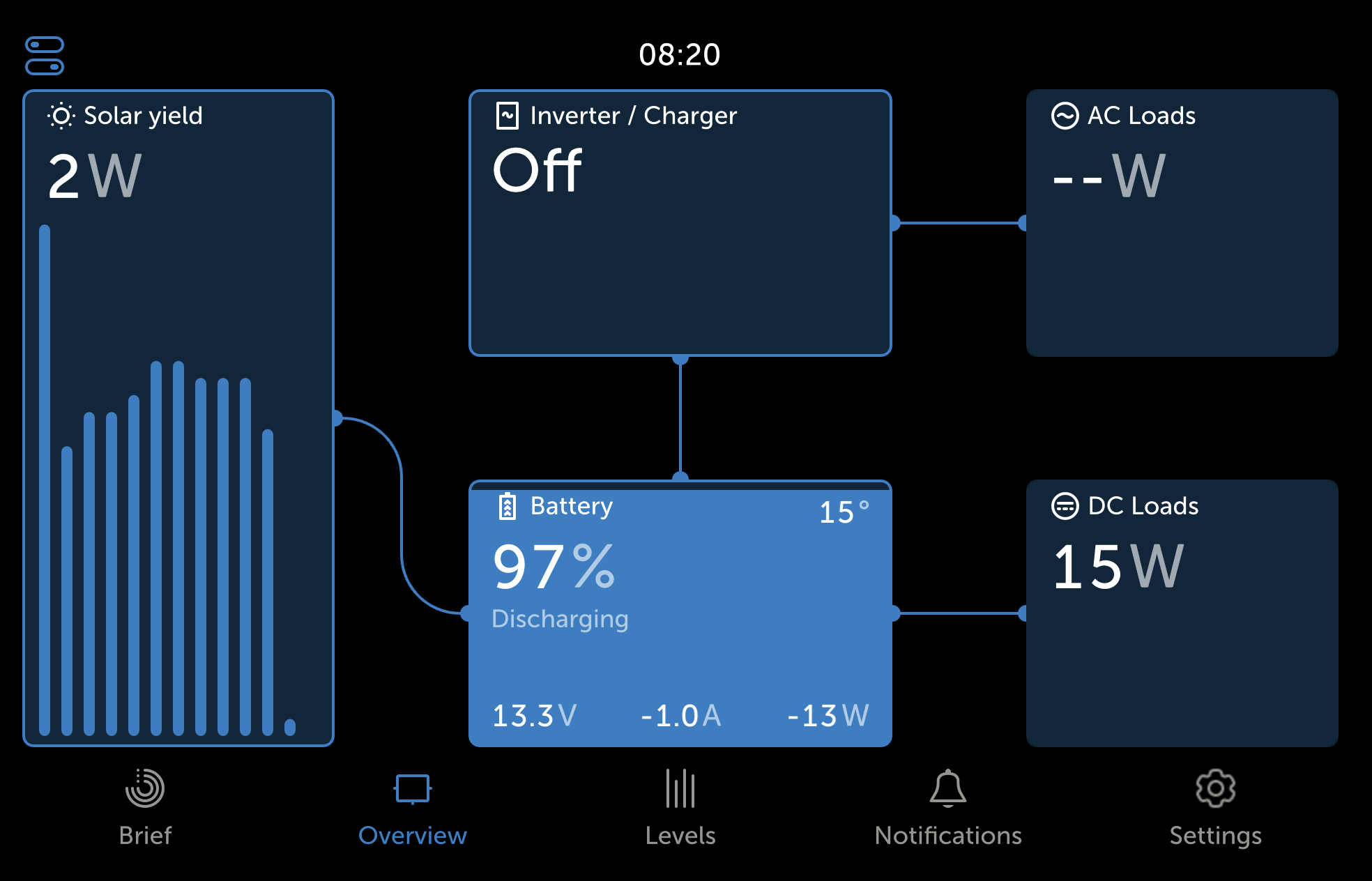
Še slika novega Victron Cerbo uporabniškega vmesnika (beta verzija) na daljavo:
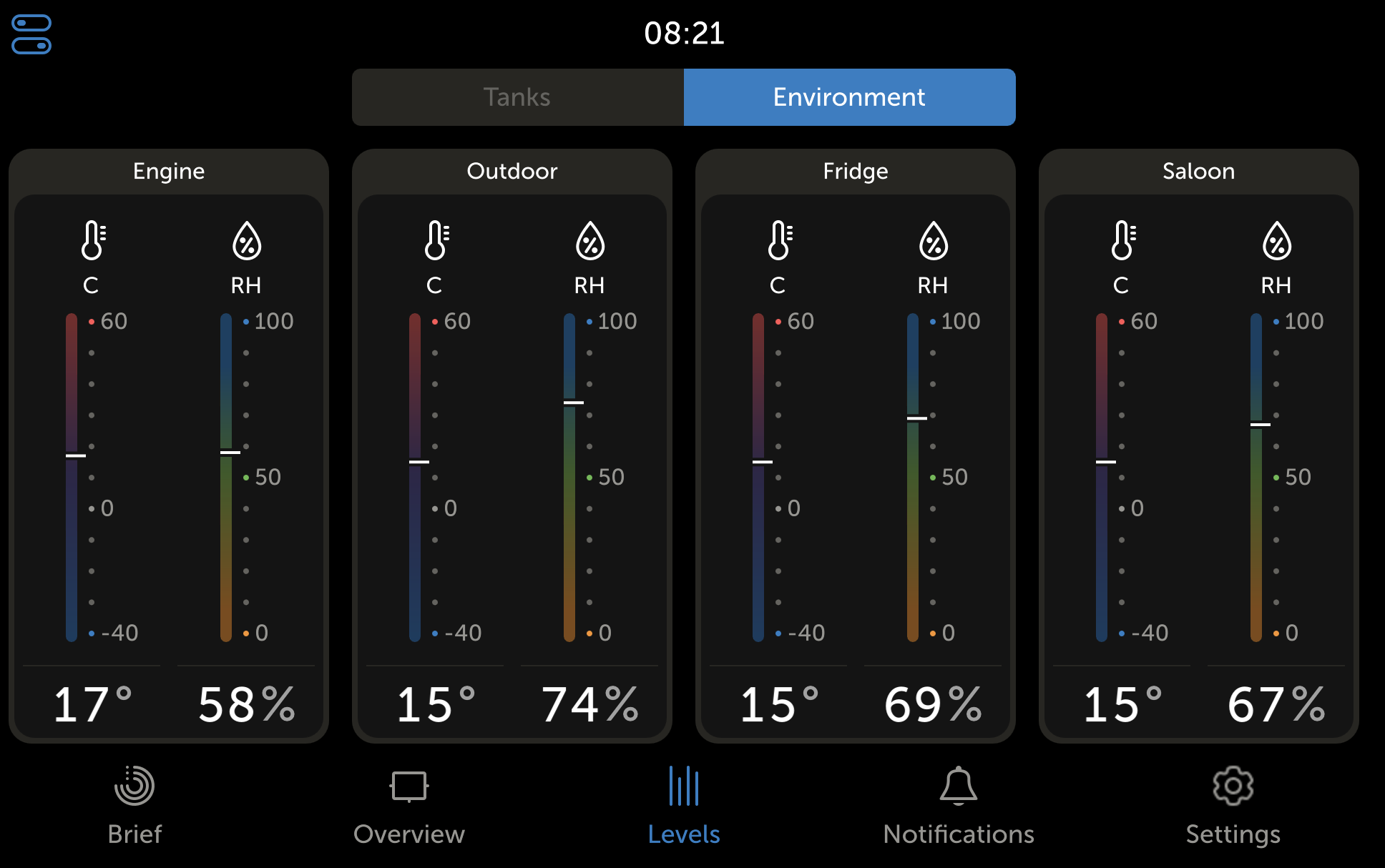
In pa Ruuvi senzorji za temperaturo:
Naslednji projekt pa je da se poigram še z SignalK na Cerbo GX in da si postavim svoj PostgSail strežnik za logiranje naših poti.